
|
||
| Menu | Demo / Demo | |
|
Downloads Installation Instructions Learning Java Documentation Tutorials Update Log
Publications People Project Roadmap Code of Conduct |
Selected Applications Video demos and short descriptions of various ArtiSynth modeling applications are given below. Those marked with an asterix * are available in the artisynth_models package.
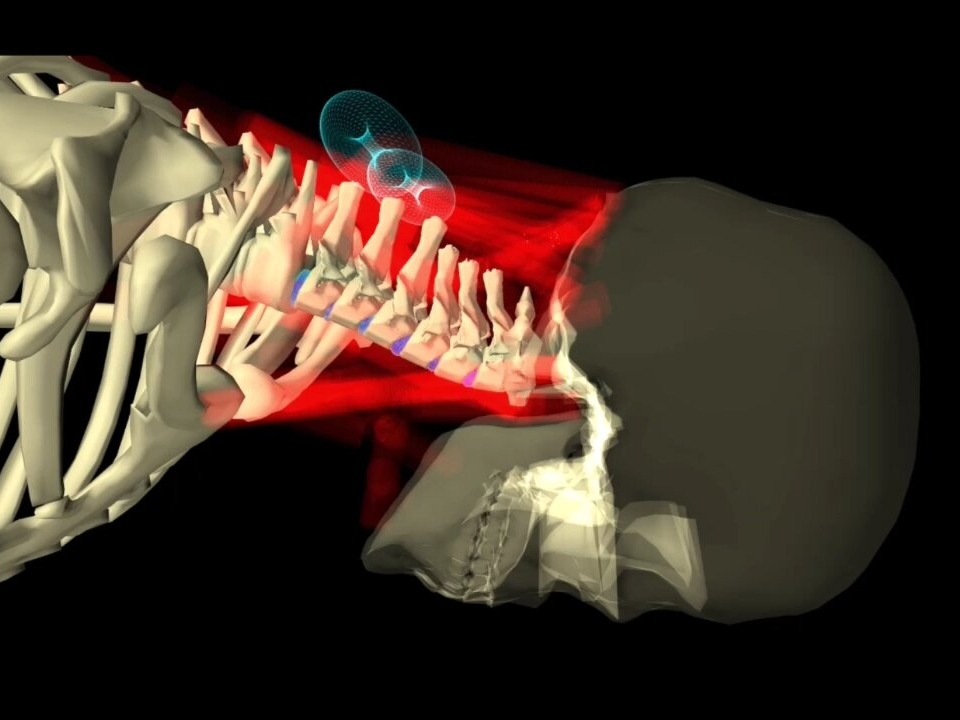 A model of the cervical spine used for studying the effects of head impacts due to activities such as rugby.
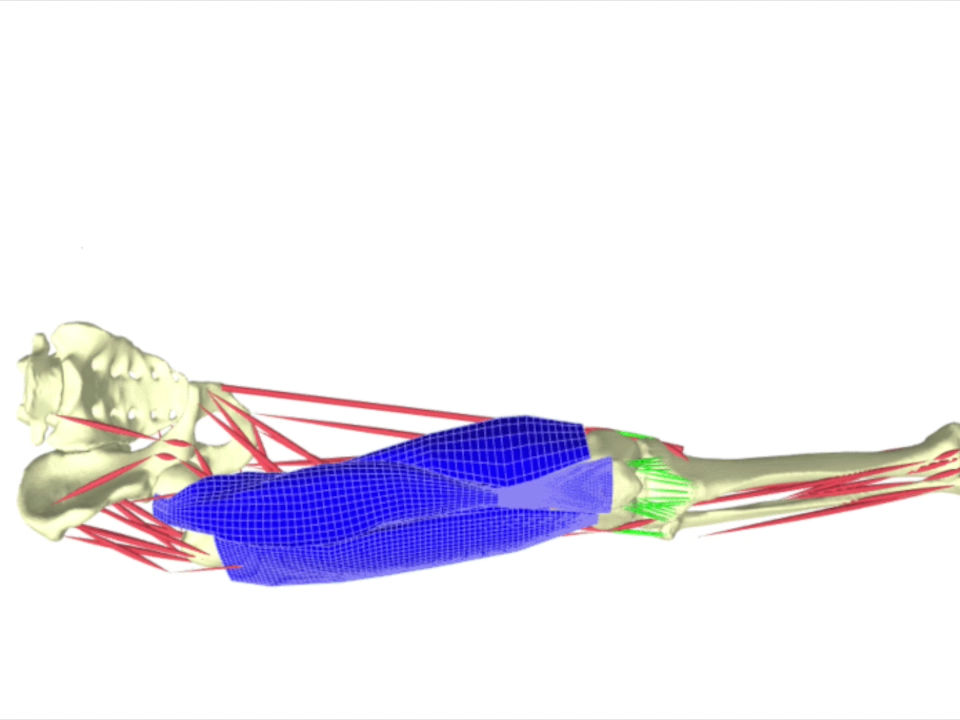 A biomechanical lower limb model with applications such as predicting outcomes related to knee replacement surgery.
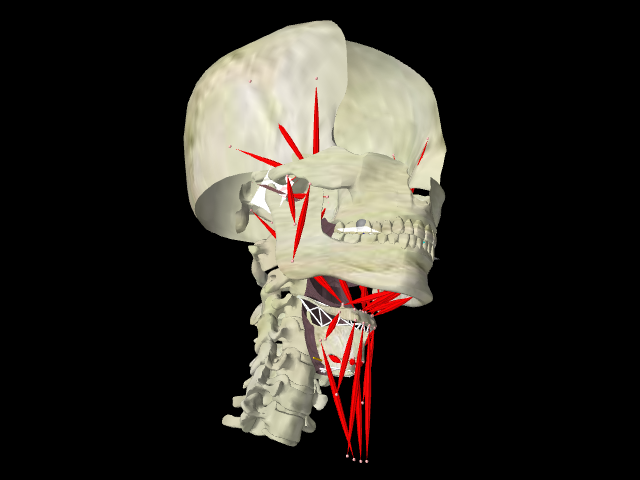
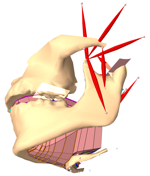
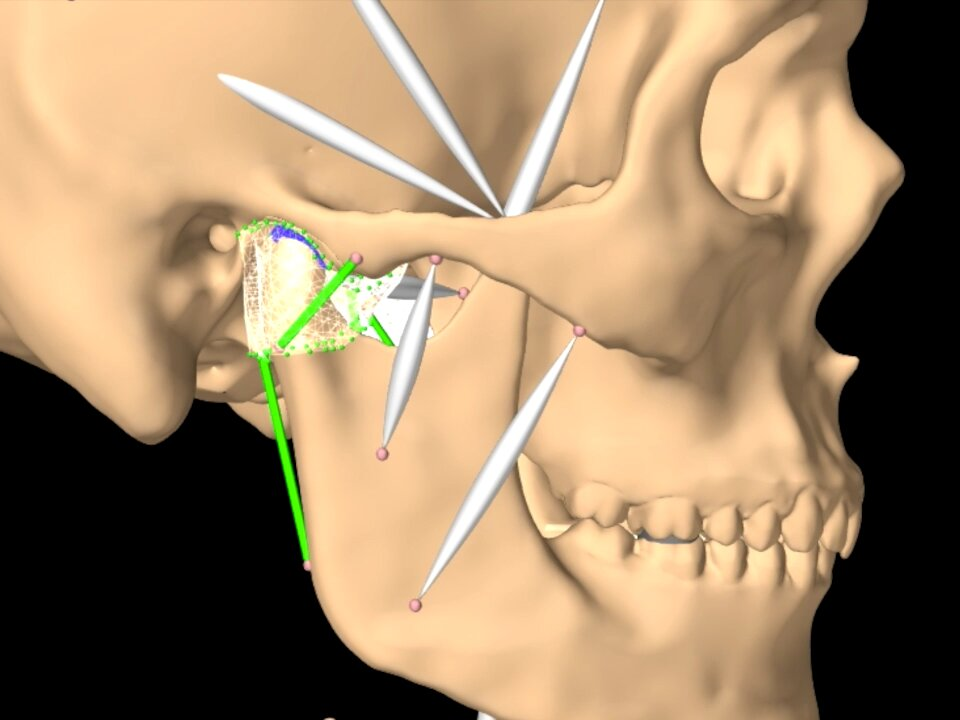 An FEM-based jaw model to study TMJ loading during mastication.
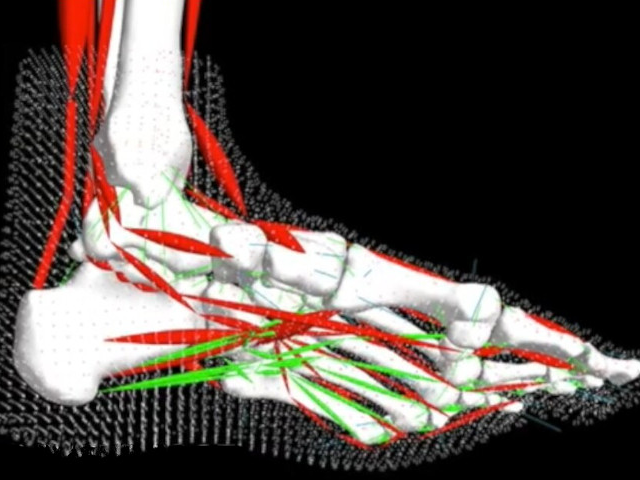 A combined musculoskeletal/FEM foot model to help prevent pressure ulcers.
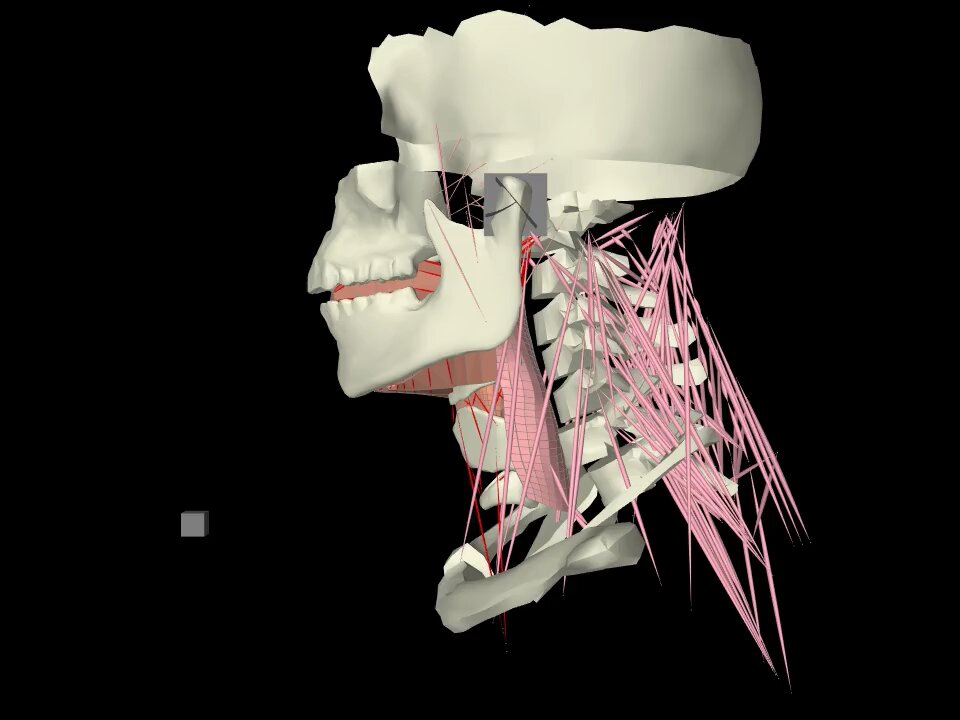 A full model of the human head and neck region.
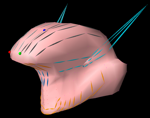
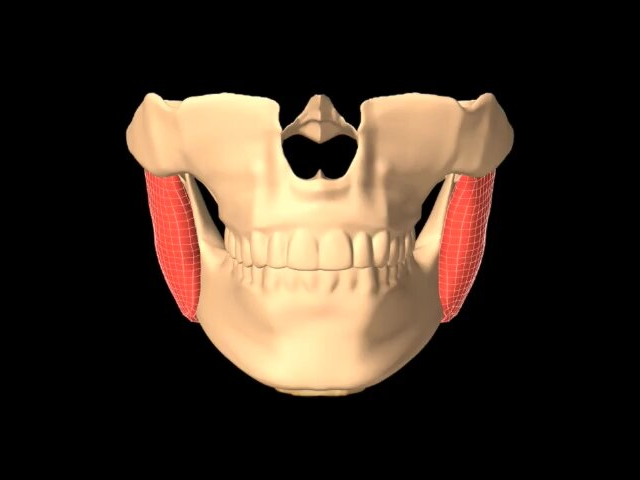 A detailed, FEM-based model of the masseter used to study chewing forces.
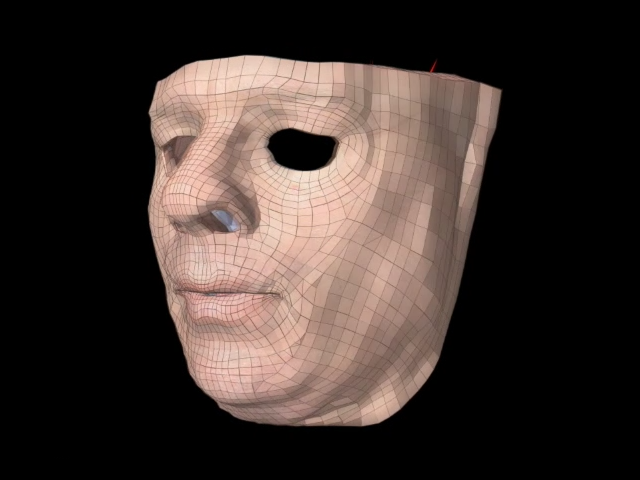 An FEM face model integrated with the jaw, skull, tongue and hyoid bone.
 A high fidelity, dynamic, biomechanical model of the human jaw and laryngeal structures.
 An FEM model of tongue with muscle activation based on 11 muscle groups.
 Coupled Jaw-Tongue-Hyoid Model* The jaw-hyoid and tongue models coupled with attachment constraints in ArtiSynth
 This models sound generation and propagation in the vocal tract and the nasal tract.
|
|
| View Edit Attributes History Attach Print Search Page last modified on April 19, 2022, at 09:08 PM | ||