
|
||
| Menu | Demo / MultibodyDynamicsContact | |
|
Downloads Installation Instructions Learning Java Documentation Tutorials Update Log
Publications People Project Roadmap Code of Conduct |
The Multibody Dynamics Contact DemoThis demo illustrates multi-body dynamics with contact. The puppet is composed of 15 rigid bodies connected together with spherical and revolute joints. Joint limits are enforced using a combination of hard limits and restoring forces created by 6 DOF "frame" springs. A pair of axial springs connect the puppet to a flat plate, which is moved about under parametric control, dragging the puppet with it. Collision VideosNote - videos require DivX plugin (e.g. VLC Player) 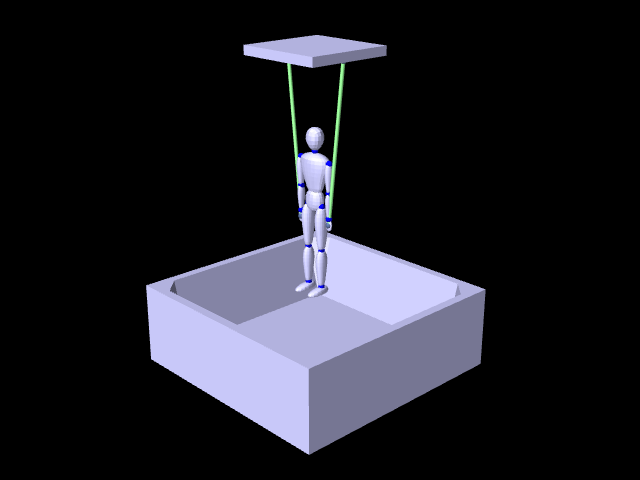 Multibody Dynamics Contact |
|
| View Edit Attributes History Attach Print Search Page last modified on August 28, 2009, at 02:43 PM | ||